عمومی,گوناگون
پاورپوینت مدلسازي راه رفتن دوپايي در مسيرهاي ناهموار با آلگوريتم كنترل MPIC
فهرست مطالب: مقدمه بررسي فيزيولوژيك سيستم كنترل راه رفتن ديناميك راه رفتن و مدلهاي رياضي مربوط به آن استراتژي كنترل امپدانس و آلگوريتم كنترل MPIC معرفي سيستم كنترل MPIC براي به كارگيري در مدل راه رفتن دوپايي بررسي نتايج حاصل از شبيهسازيها و جمعب
75
تعداد صفحات
ppt
فرمت
4,758
کیلوبایت
حجم فایل
45,000 تومان
قیمت فایل
فایل با عنوان پاورپوینت مدلسازي راه رفتن دوپايي در مسيرهاي ناهموار با آلگوريتم كنترل MPIC با تعداد 75 صفحه در دسته بندی عمومی,گوناگون با حجم 4,758
کیلوبایت و قیمت 45000 تومان و فرمت فایل ppt با توضیحات مختصر فهرست مطالب: مقدمه بررسي فيزيولوژيك سيستم كنترل راه رفتن ديناميك راه رفتن و مدلهاي رياضي مربوط به آن استراتژي كنترل امپدانس و آلگوريتم كنترل MPIC معرفي سيستم كنترل MPIC براي به كارگيري در مدل راه رفتن دوپايي بررسي نتايج حاصل از شبيهسازيها و جمعب ...و عنوان انگلیسی PowerPoint modeling of bipedal walking on uneven roads with MPIC control algorithm را می توانید هم اکنون دانلود و استفاده نمایید
توضیحات فایل:
دانلود پاورپوینت با موضوع مدلسازي راه رفتن دوپايي در مسيرهاي ناهموار با آلگوريتم كنترل MPIC،
فرمت فایل : پاورپوینت ( PPT ) قابل ویرایش.
تعداد اسلاید : 75
فهرست مطالب:
مقدمه
بررسي فيزيولوژيك سيستم كنترل راه رفتن
ديناميك راه رفتن و مدلهاي رياضي مربوط به آن
استراتژي كنترل امپدانس و آلگوريتم كنترل MPIC
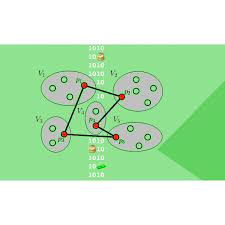
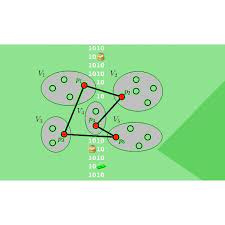
معرفي سيستم كنترل MPIC براي به كارگيري در مدل راه رفتن دوپايي
بررسي نتايج حاصل از شبيهسازيها و جمعبندي
بخشی از متن پاورپوینت:مقدمه
ويژگيهاي حركت راه رفتن
تعداد درجات آزادي زياد (حدود دويست درجة آزادي)
ناپايداري ذاتي حركت در هر سيكل حركت
تناوبي بودن
مطالب مورد بررسي در مطالعة راه رفتن
نحوة انجام حركت راه رفتن انسان
نحوة همكنش اندامهاي حسي و حركتي و مراكز توليد حركت
نقش سطوح بالايي كنترل در تنظيم اين الگوها در شرايط غيرنرمال
كاربردهاي مدل كنترل حركت دوپايي
كمك به شناخت سيستم كنترل عصبي انسان
كمك به تحليل حركت راه رفتن و شناخت عوارض و نارساييهاي اين حركت
بهكارگيري آلگوريتم كنترل مشابه در سيستمهاي روباتيك
پيشنهاد يك مدل جديد براي سيستمهاي كنترل حركت انسان
پيشنهاد يك مدل بر اساس شناخت فيزيولوژيك حركت
پيادهسازي مدل با استفاده از يك ابزار مناسب
تعيين ميزان اعتبار مدل، با استفاده از مقايسة نتايج
پروداک فایل
تسهیل در دسترسی به فایل مورد نظر در فروشگاه های فایل دارای نماد اعتماد الکترونیکی
جستجو و دریافت سریع هر نوع فایل شامل: دانشگاهی: مقاله، تحقیق، گزارش کارآموزی، بررسی، نظری، مبانی نظری
آموزشی و تدریسی: پاورپوینت، فایل، پروژه، درسنامه، طرح درس روزانه، درس پژوهی، یادگیری، آموزش، معلم، دانشآموزان، سناریوی آموزشی، بکآپ کودک.
فناوری و دیجیتال: دانلود، بکآپ، ppt، اتوکد، قابل ویرایش، حسابداری، سامسونگ دیجیتال، pdf.
روانشناسی و علوم تربیتی: پاورپوینت، طرح درس نویسی
هنری و طراحی: معماری، عکاسی، وکتور، طراحی
سایر: تم تولد، بکآپ تولد، ابتدایی، خرید دانلود رایگان، اصول، کورل، بکآپ آتلیه
![]()